Project Experiences
[2025] Seismic Source Vehicle Advanced Driver Assistance System
Mar. 2025 – Nov. 2025 [University-Enterprise Cooperation Project]
Controllable Seismic Source Vehicle Advanced Driver Assistance System Development
In collaboration with China Petroleum Group Eastern Geophysical Exploration Co., Ltd., we developed an advanced driver assistance system for controllable seismic source vehicles, designed specifically for geological exploration in harsh environments such as mines, deserts, and unstructured terrains. Traditional seismic acquisition in these settings often faces challenges including limited visibility, complex terrain, and heavy dependence on manual driving, which compromise safety and operational efficiency.
Our system integrates multi-sensor SLAM, real-time terrain perception, and intelligent planning algorithms to enable autonomous navigation in unstructured environments. By analyzing local point clouds, it quantifies terrain risk and identifies traversable paths using an adaptive sampling strategy combined with Bayesian graph search. Optimized trajectories are generated through risk-aware planning and control modules. The system also supports multi-vehicle coordination, excitation point planning, and autonomous operation—ensuring safe, efficient, and standardized deployment in rugged field conditions.

Main Responsibilities
- Developed autonomous vehicle navigation on complex terrains by implementing an adaptive sampler and Bayesian learning-based graph search algorithm to identify flat roads and ensure safe and efficient path planning.
- Achieved efficient trajectory optimization and adaptive speed control in challenging and dynamic terrains using a terrain risk-aware RRT* algorithm combined with a dynamic terrain flatness corridor and CiLQR methods.
Main Achievements
- Successfully delivered 12 complete vehicle systems, generating cumulative value exceeding tens of millions RMB. Participated in the preparation process and submission of two top SCI journal papers in robotics.
[2024] Intelligent Inspection Robot for Harsh Environments
Oct. 2024 – Jan. 2025 [University-Enterprise Cooperation Project]
Intelligent Inspection Robot System for Harsh Environments in Annealing Furnace Areas
Industrial inspection in high-temperature environments such as quenching furnace zones poses significant challenges due to extreme heat, low visibility, and confined operating space. Traditional manual inspections are often inefficient and unsafe, especially under continuous production demands. With the growing push toward intelligent, unmanned factories, there is an urgent need for autonomous systems capable of reliable operation in such harsh industrial settings.
To address this need, we developed and deployed an autonomous inspection robot specifically designed for quenching furnace environments. The system integrates multi-sensor perception, indoor positioning, and onboard computing to achieve safe, robust, and continuous monitoring. It features RGB-T-based fault detection, enabling effective identification of anomalies under variable lighting and thermal conditions. In addition, a path planning module optimized for narrow and obstacle-dense spaces ensures safe navigation in cluttered industrial layouts. The robot's four-wheel steering (4WS) system supports multiple motion modes, enabling precise trajectory tracking even in constrained environments.

Main Responsibilities
- Assisted in RGB-T dataset collection for annealing furnace areas and built an anomaly detection algorithm.
- Developed a hierarchical multimodal tracker leveraging DRL , capable of autonomously selecting the optimal steering configuration and effectively performing precise multimodal tracking in complex environments.
Main Achievements
- Successfully deployed the system to replace manual inspection in narrow and harsh environments, achieving safe, stable and autonomous operation for six months. Published two papers at top robotics conference (IROS2025).
[2024] Multi-robot for vehicle transfer at Ro/Ro terminals
Mar. 2024 – Sep. 2024 [University-Enterprise Cooperation Project]
Multi-robot system for autonomous vehicle transfer at roll-on/roll-off terminals
With the rapid development of smart port infrastructure, leading ports like Rotterdam and Ningbo have made major strides in automation. However, traditional manual operations at roll-on/roll-off (Ro-Ro) terminals struggle to meet the rising demands for efficiency, cost-effectiveness, and standardization—driven by growing throughput, labor shortages, and increasing operational complexity.
To address this challenge, we developed and deployed an autonomous robotic transfer system tailored for heavy-duty commercial vehicle handling. The system integrates centimeter-level precise localization and control for vehicle pick-up and drop-off, adaptive multi-mode motion planning and obstacle avoidance based on four-wheel steering (4WS), as well as multi-robot scheduling coordinated with port terminal systems. The system was successfully implemented at the Ro-Ro terminal of Yantai Port in Shandong, demonstrating reliable performance under real-world conditions. It achieved over 91% of manual transfer efficiency, operated continuously at 2–3× human working time. These results highlight the feasibility and value of intelligent robotic systems in enhancing Ro-Ro terminal automation.

Main Responsibilities
- Designed a hierarchical vehicle pose estimation method combining Voxel-RCNN and an improved BBox fitting algorithm to address feature loss and frequent pointcloud shape changes during vehicle pickup operations.
- Enabled dynamic and real-time port road network updates for pickup/drop-off operations and path planning, leveraging cloud scheduling system data, onboard multi-sensor perception, and vehicle status information.
Main Achievements
- Completed feasibility validation and conducted on-site field tests. Acceptance to meet accuracy, efficiency, and 15-unit mass production requirements. As key contributor, received multiple awards including the national gold award in the China International College Students' Innovation Competition. Participated in the publication of three SCI journal papers (SCIS, ESWA, ISJ) and one paper at top robotics conference (IROS2025).
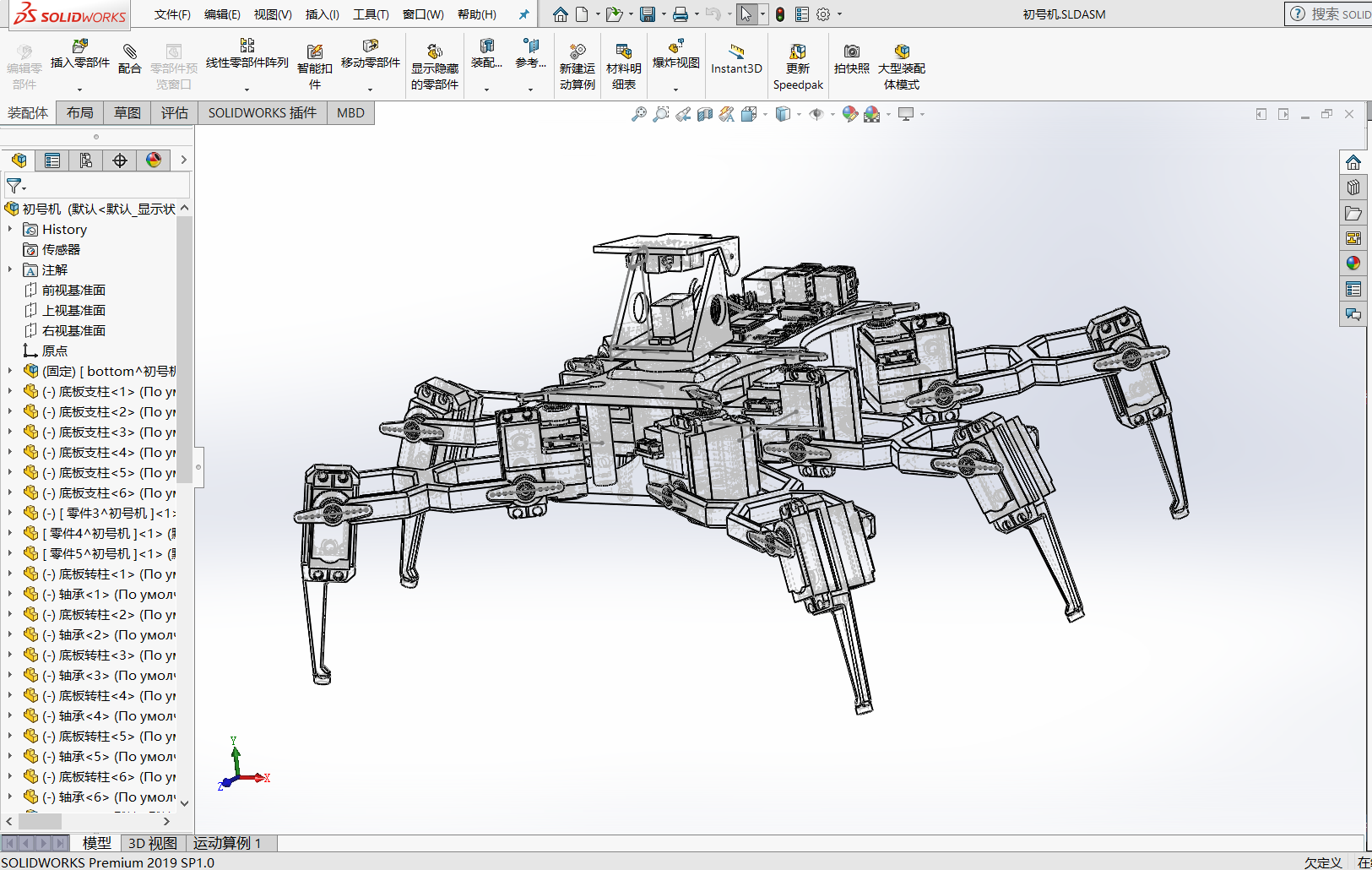
[2023] Design and Control System of Hexapod Robot
Feb. 2023 – Jun. 2023 [Bachelor's Thesis]
Design and Control System of Hexapod Robot
Code Repo: https://github.com/balmung08/Geodesic-Based-Path-Planning
With the advancement of robotics technology, hexapod robots, as a highly flexible mobile platform, have been widely used for task execution in complex environments. This project, based on the Raspberry Pi platform and combining motion control, visual tracking, and image transmission remote control technologies, designed and implemented a hexapod robot control system. The system includes core modules such as robot hardware design, motion control, remote controller drive, and image transmission, aiming to provide the robot with autonomous movement and remote control capabilities to perform tasks in complex environments. By integrating servo control, posture perception, remote control systems, and real-time image transmission, the project empowers the robot, enhancing its adaptability and flexibility in unknown and dynamic environments.
Main Contributions
- Designed and implemented the hardware structure of the six-legged robot, including the skeleton and gimbal. The structure was designed using Solidworks 3D modeling software, followed by 3D printing and assembly.
- Developed the robot control system based on Raspberry Pi, integrating servo motor control, motion planning, and feedback mechanisms, enabling the robot to perform triangular gaits and allowing the gimbal to always face the target.
- Designed the remote control circuit and PCB, later simplified by using an ESP32 development board and designing an extended PCB, with Micropython code written to control the robot remotely.
- Implemented real-time video feedback through an image transmission module, enhancing the accuracy of feedback during operation. The video transmission utilizes public networks, with an Aliyun server handling uplink and downlink connections. The UDP protocol was adopted for image transmission to improve data transfer speed and real-time performance, ensuring low-latency feedback for control commands and video.
[2021] Intelligent Driver State Monitoring System
Jun. 2021 – Aug. 2022 [Undergraduate Innovation and Entrepreneurship Training Program]
Physiological signal-based intelligent monitoring system for anomalous driver states
Code Repo: https://github.com/balmung08/Miscellaneous/tree/main/LYYA_system
Ensuring road safety demands timely, reliable detection of dangerous driving behaviors—yet current commercial solutions largely rely on camera-based systems that suffer from lighting sensitivity and privacy concerns. To address this, we designed and built a multi-sensor fusion device for detecting driver anomalies including fatigue, road rage, and drunk driving, grounded in direct physiological signal analysis.
The system uses galvanic skin response sensors as its primary modality for fatigue detection. A heart rate sensor acts as a gating switch that activates road rage detection via skin conductance once baseline alertness is confirmed. An alcohol concentration sensor independently screens for drunk driving. Together, these form a unified anomalous state detection pipeline capable of real-time monitoring across multiple risk dimensions simultaneously. A companion WeChat Mini Program was developed to support future intelligent connectivity and enable remote monitoring.
Main Responsibilities
- Responsible for sensor signal acquisition and processing, including firmware development on Arduino for multi-channel data collection and synchronization across GSR, heart rate, and alcohol sensors.
- Recruited nearly 100 volunteers and designed an emotion-elicitation protocol: exposing participants to curated video stimuli to reliably induce distinct emotional states, then collected and labeled the resulting physiological signals to construct the project's core training and validation dataset.
- Built and deployed the companion WeChat Mini Program for real-time driver state visualization and remote alert functionality.
Main Achievements
- System prototype validated for accuracy, individual adaptability, and multi-hazard coverage. Awarded National-level Undergraduate Innovation & Entrepreneurship Project by Jilin University; Silver Award at the Jilin University-level Internet+ competition.
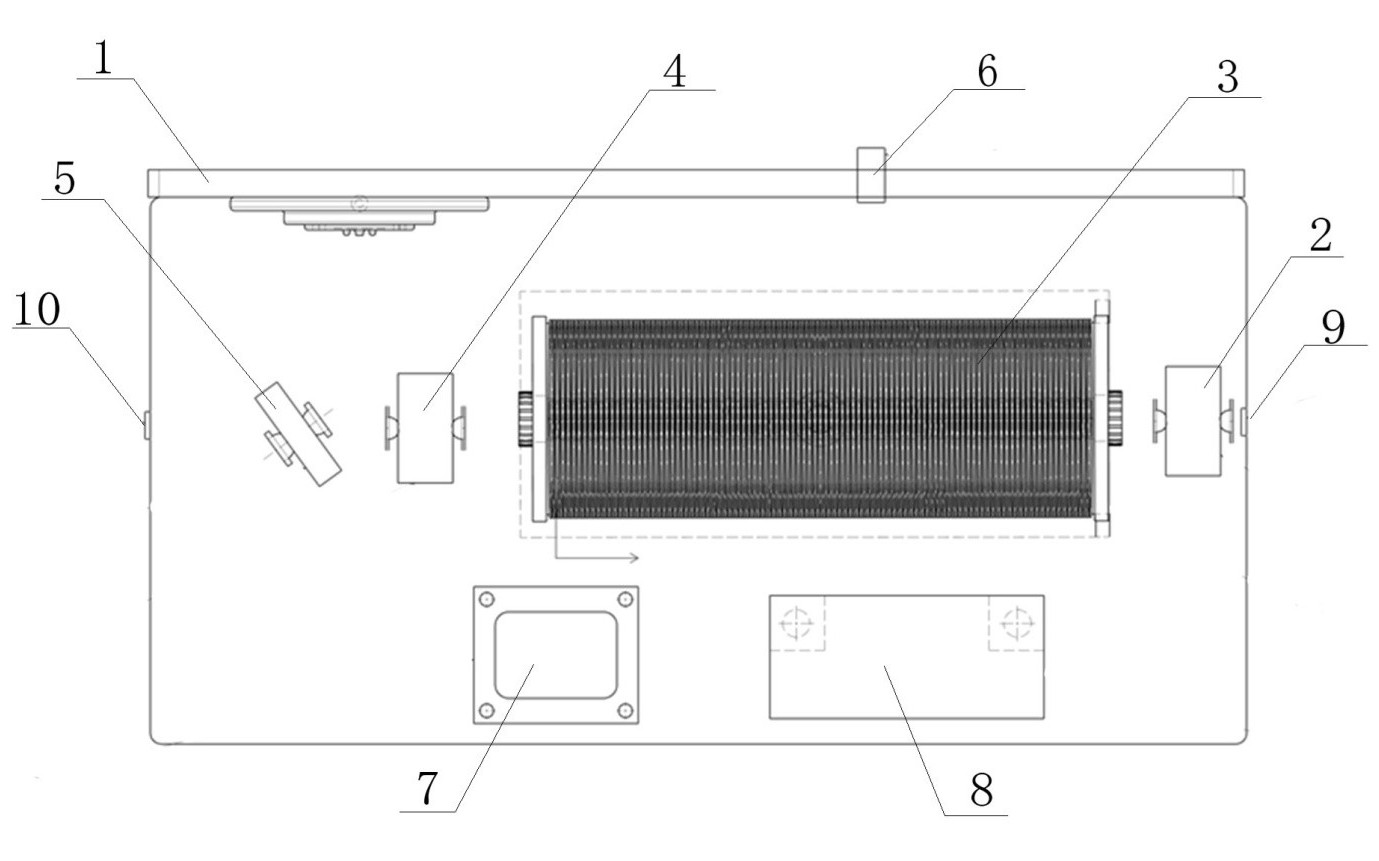
[2021] Intelligent Light Intensity Self-Stabilizing Device
Jun. 2021 – Aug. 2022 [Undergraduate Innovation and Entrepreneurship Training Program]
Design and Research of an Intelligent Light Intensity Self-Stabilizing Device Based on the Faraday Effect
Code Repo: https://github.com/balmung08/Miscellaneous/tree/main/FLD_Light
Precise optical experiments and industrial sensing demand highly stable laser sources, yet environmental disturbances often introduce significant noise. This project leverages the magneto-optical Faraday effect to develop a real-time, closed-loop light intensity regulation system. By modulating the magnetic field strength around a heavy flint glass medium, the system dynamically rotates the polarization plane of the incident light to compensate for intensity drifts.
The device integrates a compact optical path—consisting of calcite polarizers and a custom electromagnetic coil—with a high-speed STM32-based feedback controller. Unlike traditional mechanical attenuators, this solid-state approach offers rapid response times and high precision, making it suitable for integration into portable optical instruments.
Main Responsibilities
- Engineered the control system using STM32F1, implementing a TL082-based signal amplification circuit to drive the electromagnetic load with high stability.
- Authored a inverse culculating algorithm to maintain constant output intensity by processing real-time feedback from photo-detectors.
- Led the technical documentation and patent drafting.
Main Achievements
- The system prototype was validated for high precision and rapid response. This project was recognized as an "Excellent Conclusion" project by the School of Physics, Jilin University, and awarded the Prize for Excellence in the National Undergraduate Physics Experiment Competition. Furthermore, the innovative control logic and hardware design were successfully protected by one Chinese Invention Patent and one Utility Model.