Avaliable Codes
General Robot Motion Planning
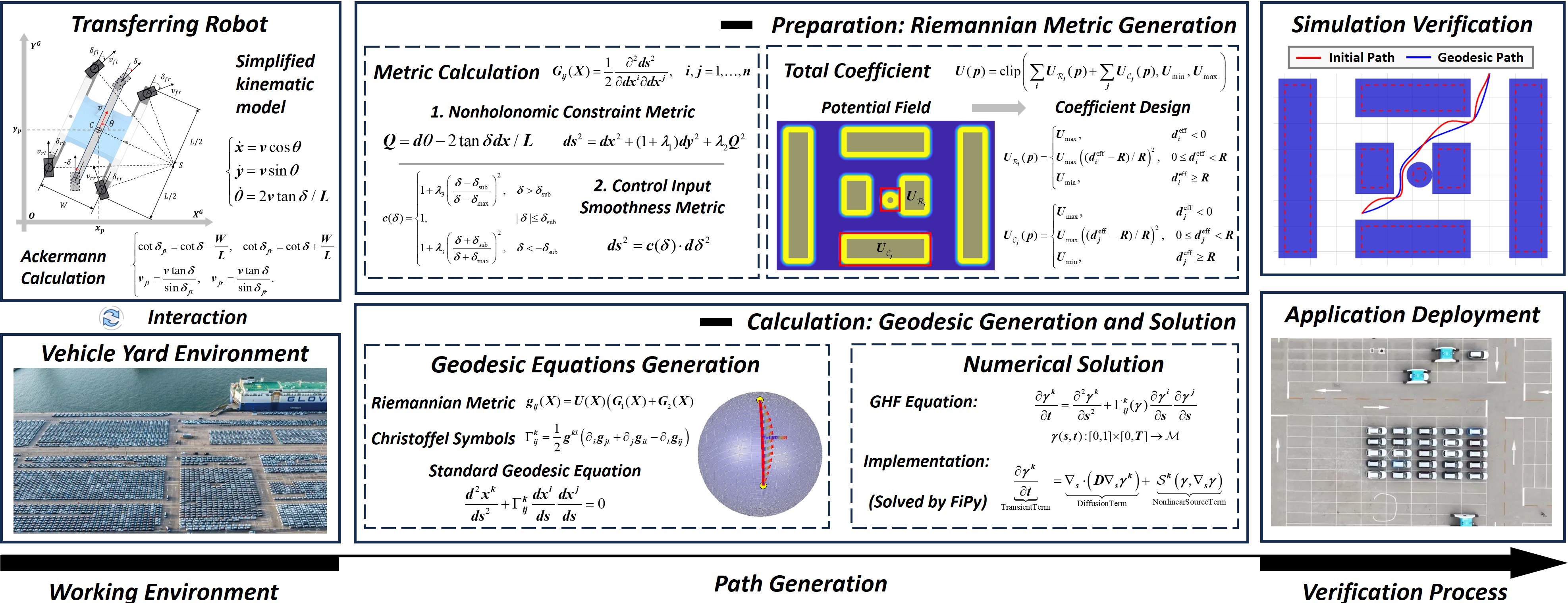
[Paper] Geodesic-Based Path Planning for Port Robots
Geodesic-Based Path Planning for Port Transfer Robots on Riemannian Manifolds
Paper: Expert Systems With Applications (ESWA 2025)
Code Repo: https://github.com/balmung08/Geodesic-Based-Path-Planning
Abstract: We propose a geodesic-based path planning method formulated on Riemannian manifolds for port transfer robots. The approach constructs a Riemannian metric tensor that jointly encodes directional motion constraints, steering effort, and obstacle accessibility boundaries into local path cost structures. This transforms the planning task into a geodesic shortest path problem, which is efficiently solved using the Geometric Heat Flow (GHF) method. The resulting paths naturally comply with kinematic constraints and exhibit strong obstacle-avoidance capabilities.
[Tools] SLAM and Motion Planning Simulation Environment
A SLAM Simulation Environment for 3D/2D Mapping with MoveBase Planning Module
Code Repo: https://github.com/balmung08/Slam_Simulation
Abstract: This project implements a Gazebo-based SLAM simulation environment that supports both 3D and 2D map construction. It uses the Lio-SAM algorithm for 3D mapping and the GMapping algorithm for 2D mapping. The environment includes a Velodyne sensor model and a robot platform, with the ability to switch between different map formats (e.g., from point cloud to laser scan). This platform provides a scalable and flexible testbed for validating SLAM algorithms. Additionally, it supports robot navigation and obstacle avoidance based on the MoveBase framework.
4WIS Robot Related Research
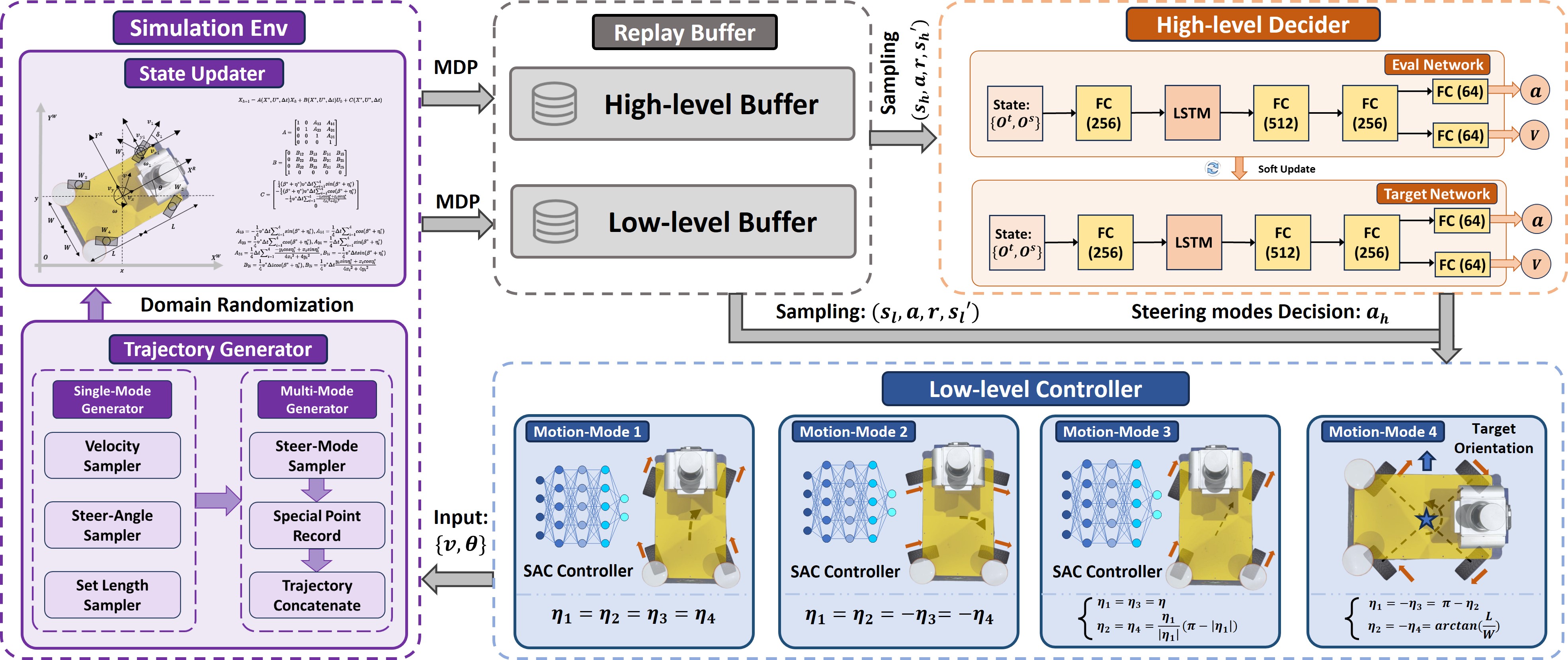
[Paper] DRL-Based Trajectory Tracking for 4WIS Robot
Deep Reinforcement Learning-Based Trajectory Tracking Framework for 4WS Robot Considering Switch of Steering Modes
Code Repo: https://github.com/balmung08/4WIS-Robot-DRL-Multimodal-Trajectory-Tracking
Abstract: We proposes a multi-modal trajectory tracking method for 4WS robots considering steering mode switching. The approach decomposes trajectory tracking into mode decision-making and tracking control, both designed based on deep reinforcement learning. The mode decider selects appropriate steering modes based on trajectory information, while the tracker executes motion control. A target trajectory random generator and training environment are developed for data-driven model training.
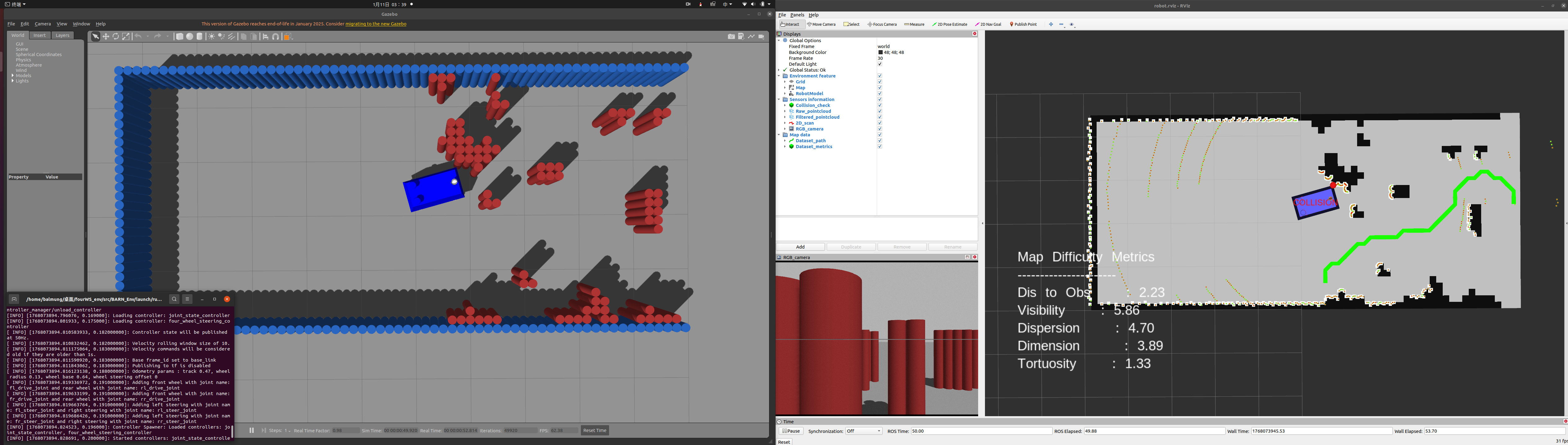
[Tools] A comprehensive simulation environment for 4WIS robots
A comprehensive simulation environment for trajectory planning and motion control of 4WIS (Four-Wheel Independent Steering) robots
Code Repo: https://github.com/balmung08/4WIS-Robot-Simulation-Environment
Abstract: We constructed a comprehensive Gazebo simulation environment for verifying 4WIS robot algorithms. This environment mainly includes the 4WIS robot URDF modeled on a real platform, a multi-source sensor system, a standardized navigation test map (BARN dataset), and a control framework that supports multimodal motion and mode switching. It provides a unified and scalable experimental platform for the simulation verification of planning and control algorithms.